







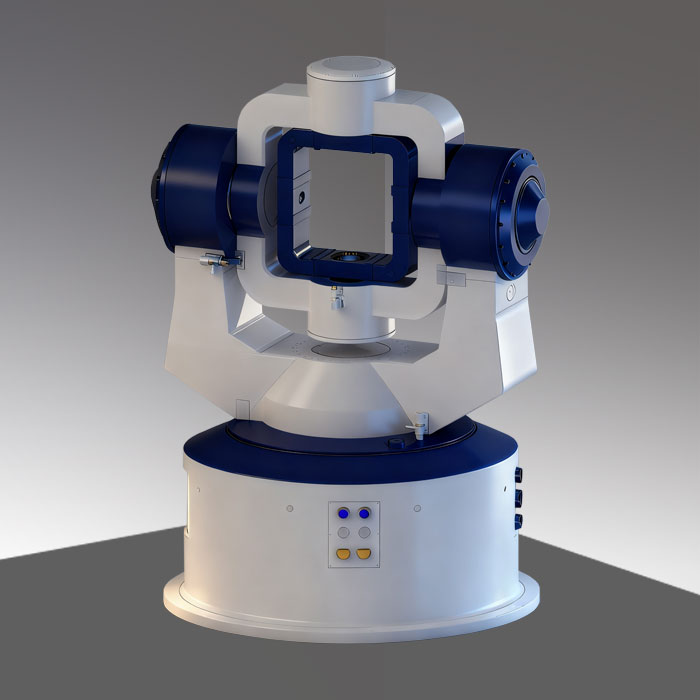
Drei-Achs-Simulationsdrehtisch
Drei-Achs-Simulation-Drehtisch besteht aus zwei Hauptteilen des mechanischen Tischkörpers und des Messsystems, der Tischkörper verwendet U-O-O-Struktur, Präzisionsmechanische Achsensystem und hohe Steifigkeit Tischkörperstruktur mit Simulation, Position, Geschwindigkeit, Schwingung und anderen Funktionen.
Drei-Achsen-Simulationsdrehtisch ist weit verbreitet in der Luftfahrt, Raumfahrt, Seefahrt und Verteidigung eingesetzt, kann Flugzeuge im Weltraum rollen, Neigung, Ablenkung und andere Gestenbewegungen simulieren, reproduzieren verschiedene dynamische Eigenschaften ihrer Bewegung, liefern die Belastung nahe der realen Bewegungsumgebung, seine hochpräzise Bewegungssimulationsfähigkeit macht es zu einem wichtigen Werkzeug für die Halbphysikalische Simulation und Testung von Führungssystemen, Steuerungssystemen und entsprechenden Geräten wie Raketen, Flugzeugen, Drohnen und anderen Flugzeugen, durch wiederholte Tests der Systemleistung, um ausreichende Testdaten zu erhalten und das System auf der Grundlage der Daten neu zu entwerfen und zu verbessern, um die Leistungsindikatoren der Gesamtkonstruktion des Flugzeugs zu erfüllen.
Drei-Achs-Simulationsdrehtesche bieten auch Positions- und Drehzahlbenchmarks für eine, zwei oder drei Achsen für die gemessene Last zum Test und Testen von Trägheitskomponenten, Komponenten und Inertionssystemen.
Maximale Belastung: 35 kg (inklusive Montagefestigungen);
Lastgröße: 400mm x 400mm x 450mm;
Drei-Achsen-Schnittgrad: ± 0,3 mm;
Drei-Achsen-Vertikalität: ± 18 ";
Montageflächengenauigkeit: ≤±2″; Positionsgenauigkeit: ≤ ± 2 ";
Montageflächenleckmagnet: ≤0,1mT (10 mm von der Montagefläche entfernt);
Leitungsreifen: Benutzerreifen mit nicht weniger als 80 Reifen;
Maschinenstischkörpergrößen: Länge 1600 x Breite 1450 x Höhe 2200mm;
Gewicht: ca. 3000 kg.
HauptLeistungsindikatoren
Drehachs-Simulationsdrehtisch | |||
Rotation (Innere Achse) | Neigung (Innere Achse) | Lenkung | |
Winkelbereich | 360°Kontinuierlich | 360°Kontinuierlich | 360°kontinuierlich |
Maximale Winkelgeschwindigkeit | 400 o/s | 400 o/s | 300 o/s |
Maximale Winkelbeschleunigung | 4000o/s2 | 2500o/s2 | 3000 o/s2 |
Mindestgeschwindigkeit | 0.003 o/s | 0.003 o/s | 0.003 o/s |
Winkelpositionsgenauigkeit | ±10.8″ | ±10.8″ | ±10.8″ |
Frequenzindikator Doppelte zehn,0.5° | 12Hz | 10Hz | 10Hz |
Zeitreihenreaktion des Signals (die1° (überreguliert)≤25%Anzahl der Oszillationen≤1 | |||