







3DT350 üç eksenli simülasyon pikap
Uygulama alanı
Atalet navigasyon sistemi testi: hız jiroskobu, ivmeölçer, kuzey bulucu, atalet ölçüm biriminin (IMU) statik testi, hız testi ve dinamik navigasyon performansı değerlendirmesi için kullanılır.
Hardware-in-the-loop simülasyonu: Bir uçuş simülasyonu pikap olarak, uçuş kontrol bilgisayarından gerçek zamanlı tutum komutları alır, füzelerin, uçakların, dronların ve diğer uçakların hava hareketlerini yeniden üretir ve rehberlik ve kontrol sisteminin performansını doğrular.
Sensör kalibrasyonu: Çeşitli açı sensörlerinin ve enkoderlerin yüksek hassasiyetli kalibrasyonu ve kalibrasyonu.
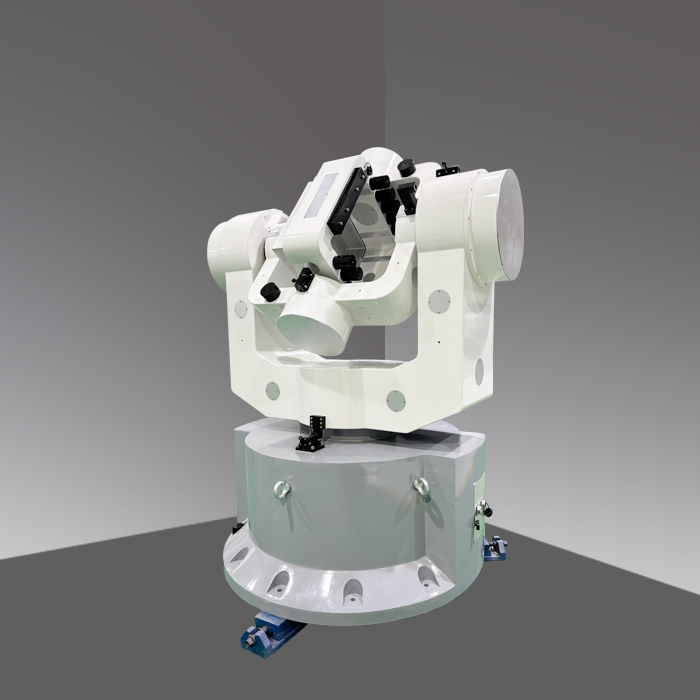
Üç eksenli simülasyon döner tablası iki bölümden oluşur: mekanik platform gövdesi ve ölçüm ve kontrol sistemi. Platform gövdesi, U-O yapısını, hassas mekanik şaft sistemini ve yüksek sertlikli platform gövde yapısını benimser ve simülasyon, pozisyon, hız ve salıncak işlevlerine sahiptir.
Üç eksenli simülasyon pikap, havacılık, havacılık, navigasyon ve ulusal savunma alanlarında yaygın olarak kullanılmaktadır. Uçağın yuvarlanma, atış, yaw vb. Uzaydaki tutum hareketini simüle edebilir ve hareketi sırasında çeşitli dinamik özellikler üretebilir. Yük için neredeyse gerçek bir hareket ortamı sağlar. Yüksek hassasiyetli hareket simülasyon yeteneği, onu yarı fiziksel simülasyon ve yönlendirme sistemi, kontrol sistemi ve karşılık gelen füze, uçak, insansız hava aracı vb. cihazlarının test edilmesi için önemli bir araç haline getirir. Sistem performansının tekrar tekrar test edilmesiyle, yeterli test verileri elde edilir ve sistem, uçağın genel tasarımının performans endeksi gerekliliklerini karşılamak için verilere göre yeniden tasarlanır ve iyileştirilir.
Üç eksenli simülasyon döner tablası ayrıca, atalet bileşenlerinin, tertibatların ve atalet navigasyon sistemlerinin test edilmesi ve test edilmesi için kullanılan test edilen yük için tek eksenli, çift eksenli veya üç eksenli konumlandırma ve hız ölçütleri sağlayabilir.
Üç eksenli simülasyon pikap, havacılık, havacılık, navigasyon ve ulusal savunma alanlarında yaygın olarak kullanılmaktadır. Uçağın yuvarlanma, atış, yaw vb. Uzaydaki tutum hareketini simüle edebilir ve hareketi sırasında çeşitli dinamik özellikler üretebilir. Yük için neredeyse gerçek bir hareket ortamı sağlar. Yüksek hassasiyetli hareket simülasyon yeteneği, onu yarı fiziksel simülasyon ve yönlendirme sistemi, kontrol sistemi ve karşılık gelen füze, uçak, insansız hava aracı vb. cihazlarının test edilmesi için önemli bir araç haline getirir. Sistem performansının tekrar tekrar test edilmesiyle, yeterli test verileri elde edilir ve sistem, uçağın genel tasarımının performans endeksi gerekliliklerini karşılamak için verilere göre yeniden tasarlanır ve iyileştirilir.
Üç eksenli simülasyon döner tablası ayrıca, atalet bileşenlerinin, tertibatların ve atalet navigasyon sistemlerinin test edilmesi ve test edilmesi için kullanılan test edilen yük için tek eksenli, çift eksenli veya üç eksenli konumlandırma ve hız ölçütleri sağlayabilir.
[Uygulama alanı]
Atalet navigasyon sistemi testi: hız jiroskobu, ivmeölçer, kuzey bulucu, atalet ölçüm biriminin (IMU) statik testi, hız testi ve dinamik navigasyon performansı değerlendirmesi için kullanılır.
Hardware-in-the-loop simülasyonu: Bir uçuş simülasyonu pikap olarak, uçuş kontrol bilgisayarından gerçek zamanlı tutum komutları alır, füzelerin, uçakların, dronların ve diğer uçakların hava hareketlerini yeniden üretir ve rehberlik ve kontrol sisteminin performansını doğrular.
Sensör kalibrasyonu: Çeşitli açı sensörlerinin ve enkoderlerin yüksek hassasiyetli kalibrasyonu ve kalibrasyonu.
Maksimum yük: 40kg
Yük boyutu: 350 mm x 350 mm x 350 mm
Bant genişliği:
Rulo (iç eksen) 10Hz, perde (merkezi eksen) 12Hz, başlık (dış eksen) 15Hz
Oran aralığı (° / s):
Rulo (iç eksen): ± (0.001 ~ 800), perde (merkezi eksen): ± (0.001 ~ 600), başlık (dış eksen): ± (0.001 ~ 400)
Maksimum yük ivmesi (° / s2):
Rulo (iç eksen): 500, Pitch (merkezi eksen): 350, Başlık (dış eksen): 300