







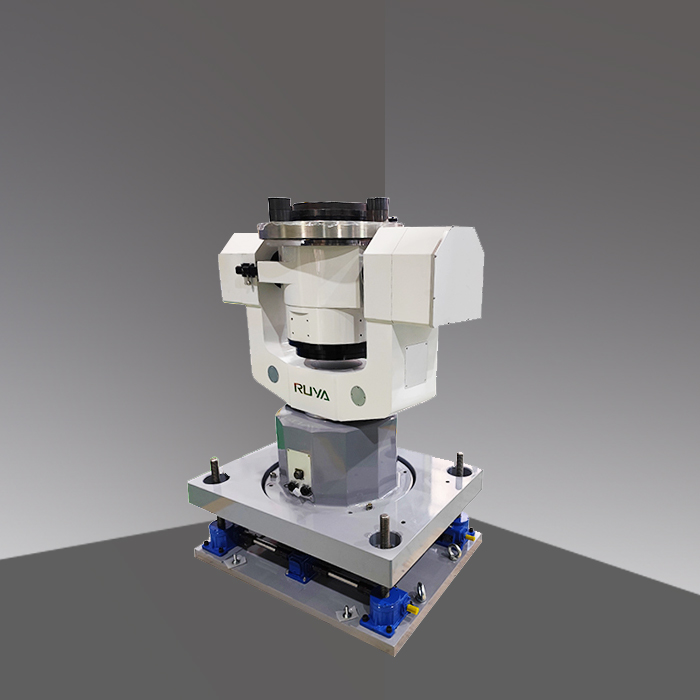
подъёмно - спускной трехосный ротор
Трехосный ротор - это испытательное оборудование, способное вращаться по трем независимым осям (как правило, тангажу, крену и рысканию), обеспечивая угловое положение, угловую скорость, эталон углового ускорения, в основном используется для тестирования и калибровки инерциальных устройств и компонентов в аэрокосмической области, БПЛА, интеллектуальных транспортных средств, потребительской электроники, виртуальных электронов и других областях. Этот тип поворотного стола также может обеспечить подъем и падение рабочего стола для удовлетворения особых потребностей клиентов в тестировании.
Основные сценарии применения:
Точная калибровка инерциальной навигации и датчиков
Испытания гироскопа и акселерометра: Ротор имитирует положение тангажа, поперечного крена и рыскания летательного аппарата в воздухе, обеспечивая точное угловое положение и угловую скорость, и используется для проверки факторов шкалы, нелинейности и пороговой чувствительности волоконно - оптических гироскопов, гироскопов MEMS и акселерометров.
Калибровка IMU: с помощью трехосной связи создается сложное движение, создается модель ошибки, осуществляется быстрая калибровка инерциальной навигационной системы и температурная компенсация для обеспечения точности ее навигации в условиях высокой динамики.
Моделирование угловых движений положения и динамических характеристик летательных аппаратов (БЛА и т.д.) во время полета. Подключите систему управления наведением к ротору, повторите траекторию полета в лабораторных условиях и проверьте точность и эффективность алгоритма управления в реальном времени.
Вес нагрузки: 50 кг
Диаметр стола: Ф 500 мм
Плотность стола: 0,02 мм
Прыжок столешницы: 0,02 мм
Точность вращения оси: ±2 "
Вертикаль оси: ±2 "
Степень пересечения осей: шар диаметром Ф 0,5 мм
Ошибка углового позиционирования: ±2 "
Повторяемость углового позиционирования: ±2 "
Диапазон скоростей
Внутренний вал: 0,01° / s ~ 100° / s;
Средняя ось: 0,01° / s ~ 100° / s;
Внешняя ось: 0,01 ° / s ~ 50° / s;
Скорость, точность и плавность:
ω≤1°/s,2×10-3(Метод усреднения 1°);
1°/s≤ω<10°/s,2×10-4(10°平均法);
ω≥10°/s ,2×10-5(Метод усреднения 360°).
Максимальное угловое ускорение
内轴:≥150°/s2;
Средняя ось: ≥100° / s2;
Внешний вал: ≥ 50° / s2
Диапазон подъема: 0 - 200 мм
用户滑环:根据客户要求定制