关于我们
专业、专注、专心
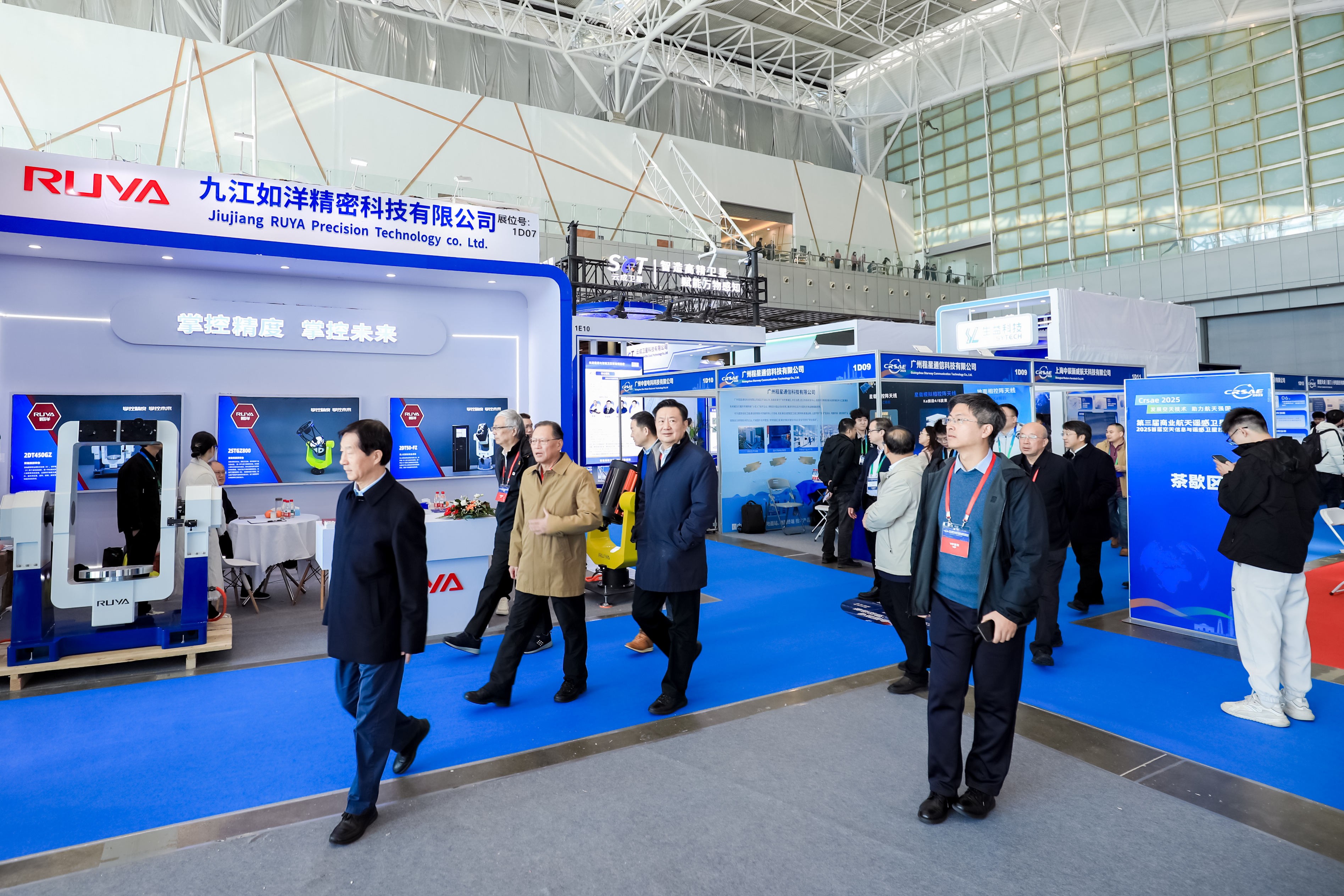
九江如洋精密科技有限公司
公司具备专业研发、设计、制造能力,拥有精密测量、机械电子、测控及软件等领域的专业技术队伍,具备强大的研发能力及工程实践能力,为企业解决几何量测量、惯性测试难题。秉承品质源于细节的生产理念,在产品研发、生产调试、售后服务等各个细节上精益求精,力求为客户提供高品质的产品、优质的售后增值服务。
了解更多 →
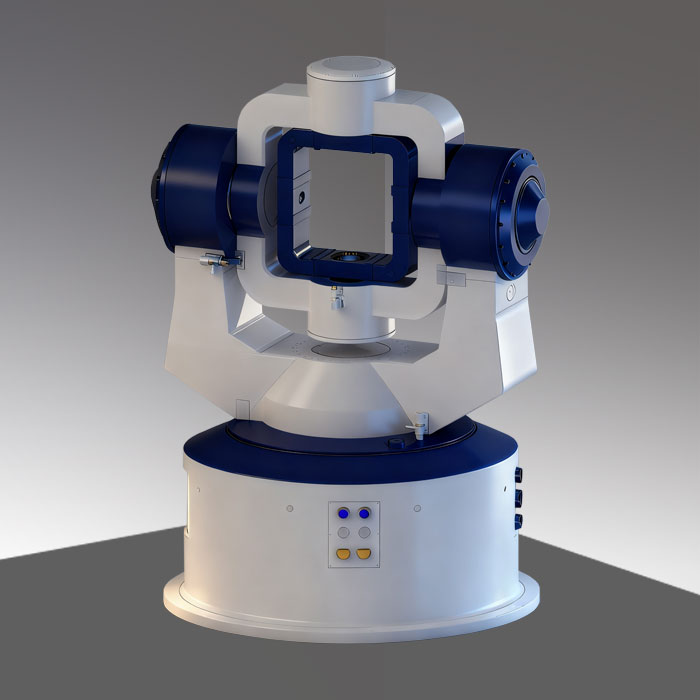
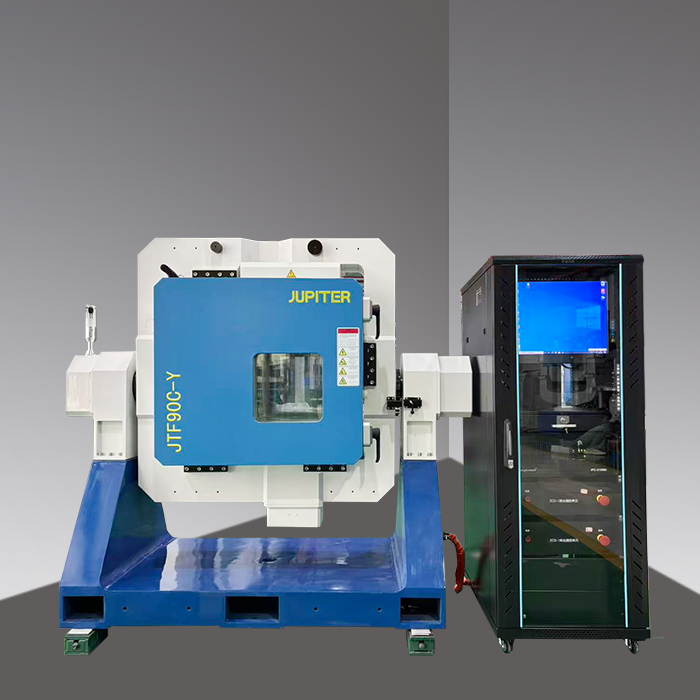
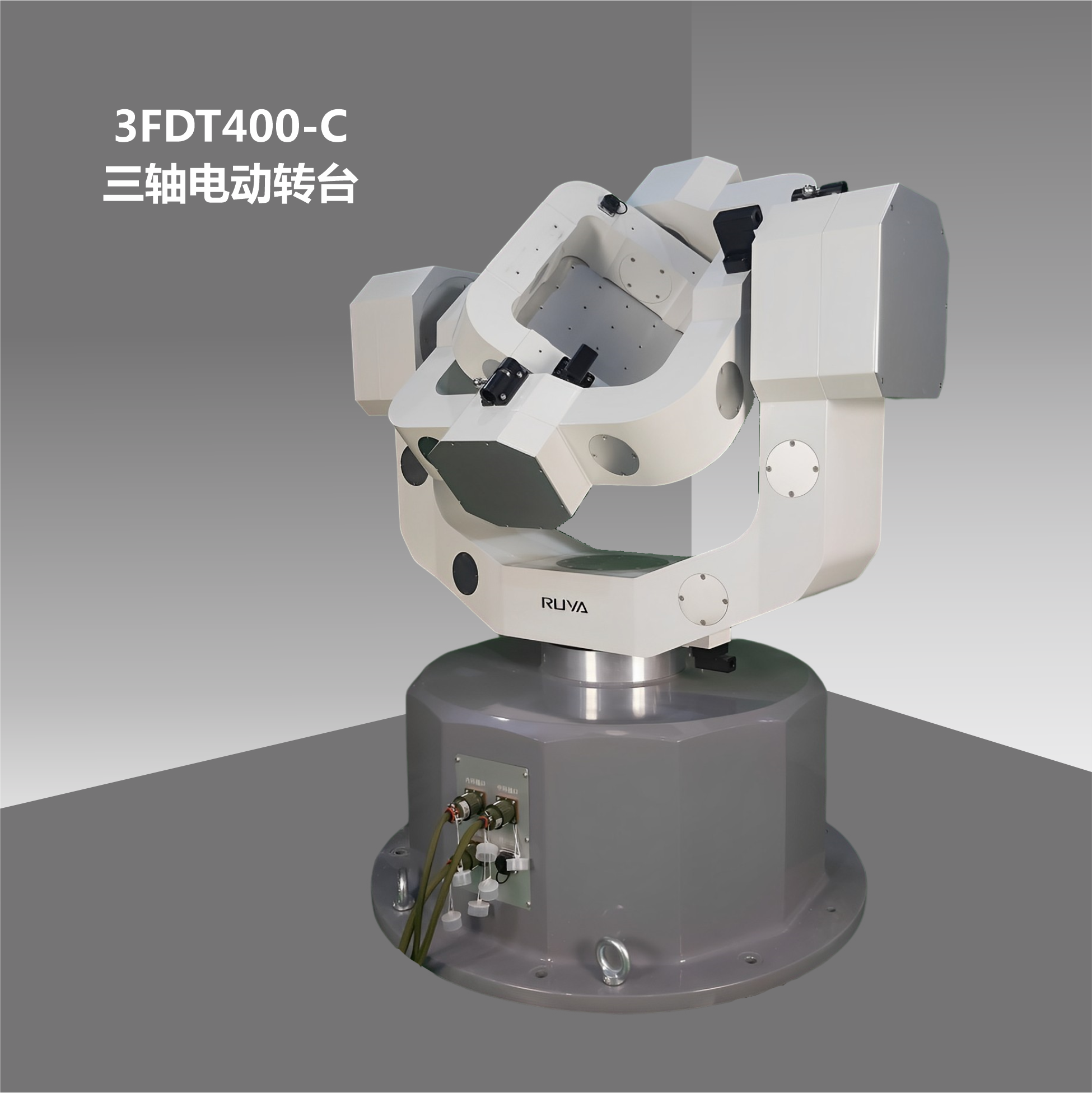
产品中心
优质产品,品质保证



新闻动态
了解最新资讯
专业、专注、专心
公司具备专业研发、设计、制造能力,拥有精密测量、机械电子、测控及软件等领域的专业技术队伍,具备强大的研发能力及工程实践能力,为企业解决几何量测量、惯性测试难题。秉承品质源于细节的生产理念,在产品研发、生产调试、售后服务等各个细节上精益求精,力求为客户提供高品质的产品、优质的售后增值服务。
了解更多 →
优质产品,品质保证
了解最新资讯